|
| |

V-BoxⅡは、DiSEqC1.2仕様のチューナーでコントロールが出来ます。 | |
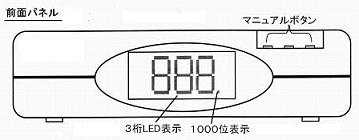 |
表示部右下の・(ドット)は、 1000の位を示します。 |
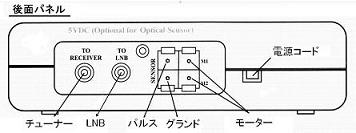 |
電源トランスは100V用になっています。 200Vを引加すると壊れます。 ご注意ください。
モーター端子へ誤ってセンサーを 詳しい接続方法はここをご覧ください。 |
 |
もし、アンテナがボタンと反対に動くようなら、 モーターの接続を逆にしてください。 |
接続例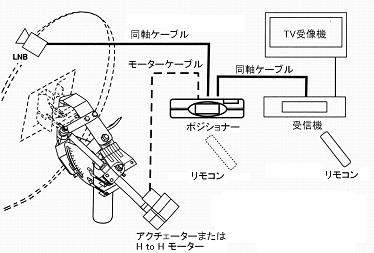
|
ポジショナーとアクチェーターの接続には、0.75sq 以上の太さの4芯ケーブルを使ってください。 アクチェーターが東西逆に動くときは、モーター端子への接続を逆にしてください。 センサーには極性はありません。
|
1 ソフトリミットの設定 これ以上絶対に回らない限界点の設定。
①リモコンの 2 ソフトリミットの解除 解除したときは、障害物に触れないように注意してください。
リモコンのLIMITボタンを2回押します。表示が" LoF "になってフラッシュしている間にENTERを押す。 3 衛星の位置の登録 衛星の位置(アンテナの向き)を記憶させます。
①リモコンの 4 衛星の位置の呼び出し 記憶している位置へアンテナを向けます。
∧/∨キーを使って呼び出す方法と、数字キーで衛星番号を入力し、ENTERを押す。二通りがあります。 5 再同期 全体のズレを補正します。
何かの影響でズレが発生して正しく受信できなくなったとき、本体の
前面パネルの
以上の説明は、スタンドアローンとして使う場合の説明です。DiSEqC機能のあるチューナーでコントロールする場合は、お使いのチューナーの使用方法もあわせてご覧ください。
| |
| |
 |
ポジショナーの操作は、MENUのAntenna Setupで行います。 この画面で"Positioner Setting 1.2"を選択してOKを押します。 |
|
1 ソフトリミットの設定 これ以上絶対に回らない限界点の設定。
①カーソルを"Movement"にあわせ、リモコンの
2 ソフトリミットの解除
カーソルを"Limit Disable"にあわせてOKを押す。
|

|
|
3 衛星の位置の登録 衛星の位置(アンテナの向き)を記憶させます。
①カーソルを"Movement"にあわせ、リモコンの |

|
|
4 衛星の位置の呼び出し 記憶している位置へアンテナを向けます。
呼び出し操作は必要ありません。チャンネルまたは、衛星を選択するだけで、アンテナが自動的に衛星の方角を向きます。 |
|
 を押し、アンテナを障害物に触れない限界点へ動かしてください。
を押し、アンテナを障害物に触れない限界点へ動かしてください。 を押し、アンテナを障害物に触れない反対側の限界点へ動かしてください。
を押し、アンテナを障害物に触れない反対側の限界点へ動かしてください。